工业自动化控制系统有哪些?一张图看懂主流架构
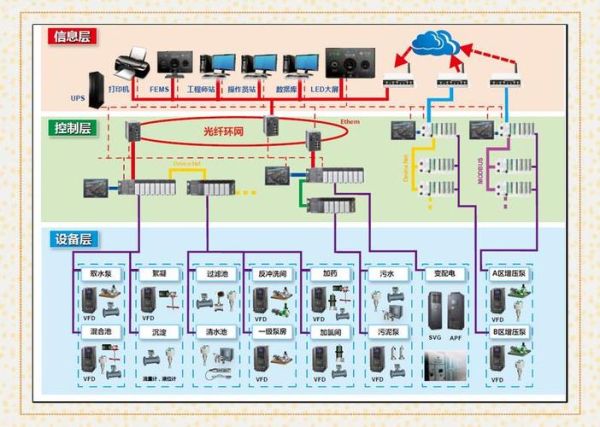
在工厂里,**“控制系统”**就像大脑,负责指挥传感器、执行器、机器人等“四肢”协同工作。常见系统可拆成三大层级:

(图片来源网络,侵删)
- **设备层**:PLC、DCS、PAC、运动控制器、嵌入式控制器
- **监控层**:SCADA、HMI、工业PC、边缘网关
- **企业层**:MES、ERP、工业云平台
PLC、DCS、PAC到底差在哪?
自问:同样是控制器,为什么有的叫PLC,有的叫DCS?
自答:
- PLC(可编程逻辑控制器):离散控制王者,毫秒级循环扫描,适合包装机、注塑机这类高速开关量场景。
- DCS(分布式控制系统):流程工业首选,模拟量闭环控制稳,石化、电厂用得多,冗余设计让故障不停产。
- PAC(可编程自动化控制器):PLC+PC的混血,既能跑逻辑又能做算法,复杂运动控制和视觉检测一把抓。
工业自动化控制系统如何选型?七步决策模型
第一步:明确工艺属性——离散还是流程?
自问:做汽车焊装车间,该用DCS吗?
自答:焊装以高速点位控制为主,**选PLC+运动控制模块**更划算;若涉及涂装烘干恒温,可局部加DCS温控回路。
第二步:I/O规模与实时性计算
用一张表快速估算:
(图片来源网络,侵删)
| 场景 | 数字量I/O | 模拟量I/O | 扫描周期要求 |
|---|---|---|---|
| 小型包装线 | 128点以内 | 8路以内 | 10 ms |
| 中型物流分拣 | 512~2048点 | 64路 | 5 ms |
| 大型化工装置 | 上万点 | 上千路 | 100 ms~1 s |
当I/O超过2048点且模拟量占比高时,**优先考虑DCS或冗余PLC**。
第三步:通信协议与生态锁定
自问:西门子PLC能直接连EtherCAT伺服吗?
自答:原生不支持,需加装EtherCAT模块;若一开始就选**倍福或欧姆龙**,则协议匹配零成本。提前锁定**Profinet、EtherNet/IP、CC-Link IE**三大主流总线,可减少后期网关开销。
第四步:冗余等级与停机成本核算
计算方式:
年度停机损失 = 单次停产损失 × 故障概率 × 年故障次数
当损失超过**控制器成本的3倍**时,果断上双CPU冗余、双网环网。

(图片来源网络,侵删)
第五步:软件易用性与人才储备
亮点对比:
- 西门子TIA Portal:拖拽式编程,高校教材多,新人上手快。
- 罗克Studio 5000:标签化编程,美资企业标配,英文资料丰富。
- Codesys:支持多家硬件,适合OEM厂商统一平台。
第六步:生命周期与备件策略
自问:十年前的PLC还能买到备件吗?
自答:主流厂商承诺**10~15年备件供应**,但冷门型号可能5年就停产。签订**“备件共享协议”**或采用**“同系列模块化升级”**可降低风险。
第七步:总拥有成本TCO测算
把账算细:
- 硬件采购:只占TCO的25%
- 软件授权:SCADA点数、高级工艺包年年续费
- 调试人力:复杂运动控制可能占项目周期40%
- 培训与文档:内部工程师认证费用常被低估
结论:**别只看CPU单价,要把五年内的升级、维护、培训全部算进去**。
实战案例:锂电池卷绕机选型拆解
需求清单:
- 8台伺服同步控制,电子凸轮精度±0.01 mm
- 张力模拟量闭环1000 Hz
- 设备需24×7运行,年停机<4 h
- 客户指定EtherCAT总线
选型过程:
- 工艺:离散高速运动→排除DCS
- I/O:数字量384点,模拟量64路→中高端PAC
- 协议:EtherCAT→欧姆龙NJ或倍福CX
- 冗余:停机损失高→双CPU热备+UPS
- 软件:Codesys平台,OEM已有成熟凸轮库→缩短开发30%
- TCO:硬件贵15%,但调试周期缩短20%,综合成本反而低
最终方案:**倍福CX2040 + TwinCAT NC PTP + EtherCAT伺服 + 双电源冗余**。
未来三年,选型必须关注的三大变量
- TSN时间敏感网络:一网到底,实时与非实时数据共用,2025年后或成标配。
- AI推理下沉到边缘:控制器内置NPU,视觉缺陷检测无需工控机。
- 开放自动化:IEC 61499标准让软硬件解耦,换CPU不换程序成为可能。
把上述七步模型做成内部模板,下次新项目启动时,团队只需30分钟就能完成首轮筛选,**避免“拍脑袋”决策带来的返工与超支**。
评论列表